



In recent news that has stirred conversation across social media and the tech world, a Tesla Cybertruck reportedly crashed into a pole in Reno, Nevada while operating in self-driving mode. This incident has once again brought the safety and reliability of advanced driver-assistance systems, such as Tesla’s Full Self-Driving (FSD) feature, under close scrutiny.
Introduction
Self-driving technology has been touted as the future of transportation—a way to reduce accidents, lower traffic congestion, and improve overall driving comfort. Tesla, one of the front-runners in this industry, has invested heavily in FSD, promising immense improvements with every new version. However, despite these advancements, concerns continue to rise as reports of accidents emerge. One such case involves a Tesla Cybertruck that, while relying on its self-driving capabilities, crashed into a pole in Nevada. The owner, Jonathan Challinger, a drone software developer from Florida, has taken to social media to warn others about the potential pitfalls of trusting this technology too implicitly.
BuzznowDaily
The Incident in Reno, Nevada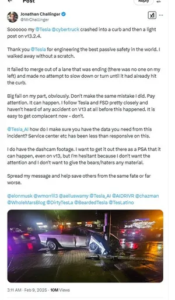

On a recent Sunday, Jonathan Challinger posted on X about his unsettling experience with the Tesla Cybertruck. According to his account, while the vehicle was using its FSD feature, it failed to merge out of a lane that was ending. Instead, the truck hit the curb and ultimately crashed into a pole in Reno, Nevada. In his now-deleted post, Challinger emphasized the need for caution, urging others not to repeat his mistake. “Don’t make the same mistake I did. Pay attention. It is easy to get complacent now—don’t,” he advised, tagging Elon Musk in an attempt to raise awareness.
When contacted by the Reno Gazette-Journal (part of the USA TODAY Network), Challinger confirmed that the Cybertruck was indeed in self-driving mode at the time of the crash. However, he chose not to reveal further details or any communication he might have had with Tesla following the incident.

Understanding the Tesla Cybertruck and Its FSD Feature
The Tesla Cybertruck has captured the imagination of many with its futuristic design and robust features. At the heart of its promise lies the Full Self-Driving (FSD) software, designed to handle complex driving situations with minimal human intervention. Yet, this recent incident underscores the challenges that still confront the technology.
Tesla’s approach to self-driving primarily relies on a network of cameras, coupled with advanced algorithms, to interpret the vehicle’s surroundings. This vision-only system is designed to keep costs lower and streamline hardware, but it may struggle under certain conditions. For example, adverse weather conditions like heavy rain, snow, or fog can impair camera performance, leading to potential safety risks.
Experts have noted that this reliance on cameras over other sensor technologies, such as LiDAR (Light Detection and Ranging), can pose challenges in terms of data mapping and nighttime detection. Researcher Troy Teslike, known for closely tracking Tesla’s sales and technology advancements, has specifically pointed out issues with FSD’s nighttime detection abilities in similar incidents.
Technical Specifications and Comparison
To better understand where Tesla’s Cybertruck stands, let’s take a look at some technical details and compare Tesla’s FSD approach with other autonomous driving systems on the market.
Cybertruck and FSD Specifications
| Feature | Tesla Cybertruck FSD | Competitor A (e.g., Waymo) | Competitor B (e.g., GM Super Cruise) |
|---|---|---|---|
| Primary Sensor Technology | Cameras only | Combination (LiDAR, Cameras) | Primarily Cameras with LiDAR enhancements |
| Nighttime Detection | Reported issues in low-light | Generally reliable | Reliable with sensor fusion |
| Data Mapping Approach | Vision-only mapping | Detailed 3D mapping | 3D mapping with periodic updates |
| Software Version | Latest is Version 13 | Continuously updated proprietary tech | Regular updates with safety enhancements |
| Reliability in Adverse Weather | Lower reliability in heavy rain/snow | Higher due to sensor redundancy | Moderate reliability; ongoing improvements |
As seen in the table, Tesla’s strategy of relying solely on cameras presents some challenges when compared with systems that incorporate LiDAR and 3D mapping. While the cost benefits are clear, these trade-offs may affect performance in scenarios that demand precise detection and mapping, especially during nighttime or in poor weather conditions.
A Closer Look at the Self-Driving Debate
The Promise and the Perils
Tesla’s vision of a future where vehicles can navigate roads autonomously is undeniably appealing. The potential benefits—reduced accidents, more efficient traffic flows, and enhanced mobility—have driven significant investments in FSD technology. Yet, the incident in Reno is a stark reminder that technology, no matter how advanced, is not infallible.
Tesla has faced its share of criticisms and regulatory investigations related to its driver-assistance software. The concerns are not new; similar issues have surfaced in the past, including fatal accidents. Last month, Elon Musk himself acknowledged skepticism around the technology while promoting the “immense improvement” in FSD’s latest version. This ongoing evolution in the software aims to address known limitations, but as the Reno crash shows, real-world performance can sometimes lag behind expectations.
Industry Comparisons
When comparing Tesla’s approach to that of competitors like Waymo or GM’s Super Cruise, several key differences emerge. Competitors often employ a multi-sensor approach that combines cameras with LiDAR or radar systems, which can provide a more comprehensive understanding of the vehicle’s surroundings. This sensor fusion is particularly effective in low-visibility situations and complex urban environments.
For instance, Waymo’s system uses a blend of LiDAR, radar, and cameras to create a detailed 3D map of the environment, allowing for more accurate obstacle detection and decision-making. GM’s Super Cruise, while primarily camera-based, incorporates additional sensors to enhance its performance during long highway drives. These approaches, although more expensive, offer a level of redundancy that can be critical when navigating unpredictable real-world conditions.


Safety and Public Perception
The incident has sparked discussions not only among tech enthusiasts and automotive experts but also within the broader public. Jonathan Challinger’s warning on social media reflects a growing unease among drivers who rely on self-driving features. His message resonates with many who are concerned about the potential consequences of becoming too complacent when technology is perceived as “smart enough” to handle all driving tasks.
This debate is particularly relevant given the rapid pace at which autonomous vehicle technology is being integrated into everyday life. While many users are enthusiastic about the convenience and futuristic allure of self-driving cars, incidents like this remind us that human vigilance remains a critical component of road safety.
Furthermore, the incident underscores the need for clear guidelines and regulatory oversight to ensure that self-driving technologies are rigorously tested and proven safe before they are fully integrated into public roadways. As technology continues to evolve, striking the right balance between innovation and safety will be crucial.
Conclusion
The Tesla Cybertruck crash in Nevada serves as a cautionary tale in the rapidly evolving world of autonomous driving. While Tesla’s FSD technology represents a significant leap toward a future where vehicles can operate independently, the incident highlights the potential risks when systems are not yet fully reliable. Jonathan Challinger’s experience, shared openly on social media, is a stark reminder that even cutting-edge technology has limitations.
Tesla’s reliance on a camera-only system, while cost-effective, may struggle in challenging environments, as evidenced by this recent accident. In contrast, other industry players employing multi-sensor solutions offer a glimpse into how redundancy and comprehensive mapping can improve safety outcomes. The comparison underscores a critical point: technological advancements must be matched with rigorous testing and a cautious approach to ensure that innovations do not come at the expense of public safety.
As the debate over self-driving technology continues, one thing is clear—continuous improvement and open dialogue between manufacturers, regulators, and the public are essential. For now, drivers are encouraged to remain alert and proactive, even when their vehicles are equipped with advanced driver-assistance features. The future of transportation is undoubtedly exciting, but it will require ongoing vigilance, thoughtful regulation, and a commitment to safety to truly realize its promise.
By learning from incidents like the one in Reno, we can work together to refine and perfect the technology that promises to revolutionize how we travel, ensuring that when the day comes, autonomous vehicles will be both innovative and safe for everyone on the road.